| 旭日x3派首百尝鲜 | 您所在的位置:网站首页 › 舵机 供电 › 旭日x3派首百尝鲜 |
旭日x3派首百尝鲜
|
旭日x3派首百尝鲜——无线串口通信控制舵机
在设计机器人结构时,我们常常会用到舵机,作为旭日x3派“首百尝鲜”活动的试用者,本次实验我准备用旭日x3派控制一台舵机,为了方便读者了解实验的设计意图,下面先提出几个基本问题以供讨论: (1)什么是舵机?舵机是一种能够按照指定角度转动的电动执行器。 (2)舵机的结构?舵机一般由马达、减速齿轮组、电位器和控制电路组成。 (3)怎样控制舵机动作?给舵机提供一个特定的PWM信号,舵机就可以旋转到指定的位置。 
(4)怎样用旭日x3派远程控制一台舵机?旭日x3派本身有两个PWM脉冲信号端口(32、33),受限于供电电流,一般不建议直接控制舵机,所以我们需要借助MCU驱动舵机运动,而旭日派的任务就是给MCU发送指令,通常我们想到的就是通过串口(旭日派UART3的14、15端口)发送指令,仅仅为了串口硬线连接而把旭日派与MCU“绑定”到一起,倒不如通过无线串口通讯方便实用,所以本文准备探索通过无线串口通信控制一台舵机。 (5)有没有具体方案?如果采用普通舵机,还要考虑MCU的编程,为了简化起见,采用UART串行总线舵机,只需要向舵机控制板发送指令,舵机就会按照指定角度旋转,这样就大大简化了编程。对于无线串口部分,我们采用无线发送接收模块实现。 2. 总体方案具体方案如下图所示,笔记本电脑通过wifi(SSH无线网络ip地址)连接并登陆旭日x3派,实现笔记本端到旭日派端的无线连接,旭日x3派与串口控制板采用无线串口收发器,实现旭日派与MCU控制板之间无线传递“信息”。 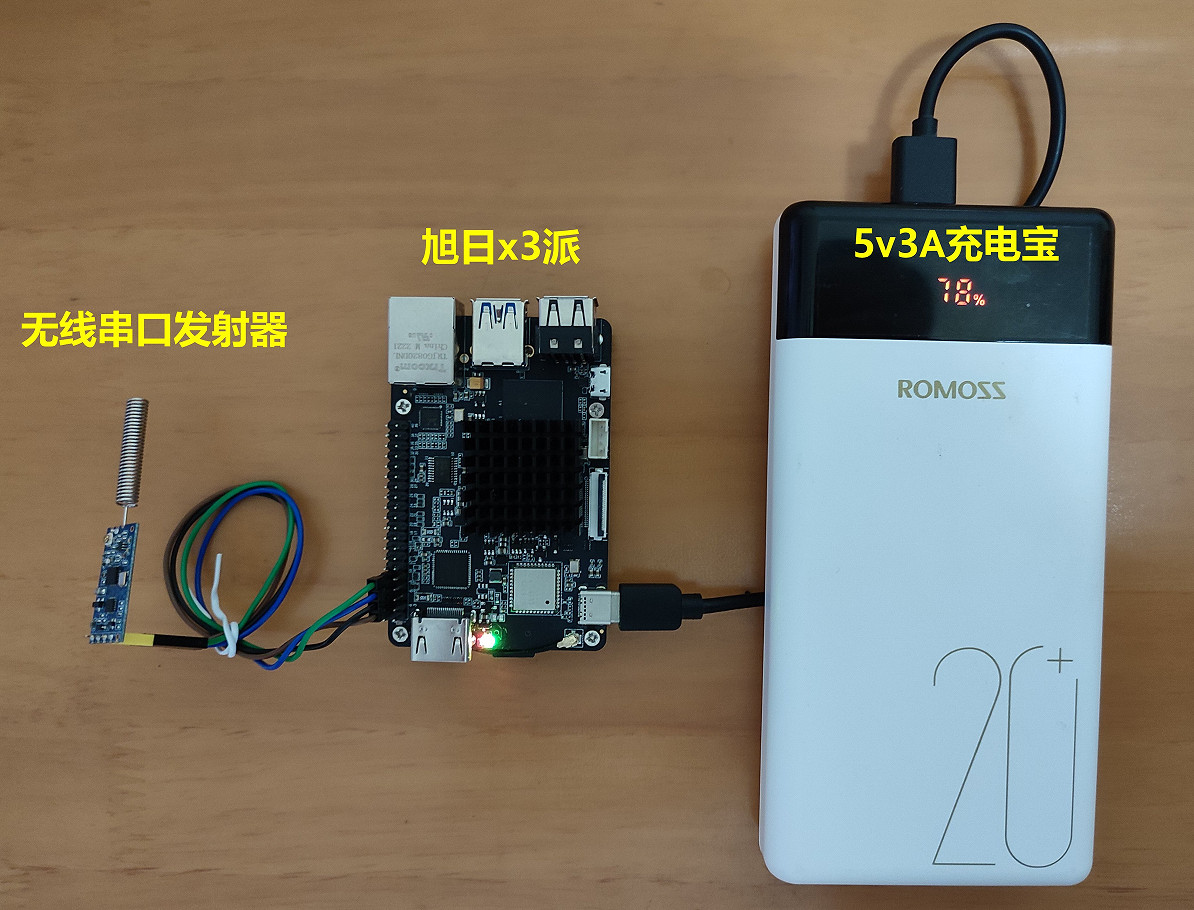
 3. 控制编程
3. 控制编程
下面借鉴了官方python例程,并做了修改: #!/usr/bin/env python3# coding = utf-8import sysimport osimport timeimport serialimport serial.tools.list_portsdef serialTest(): print("List of enabled UART:") os.system('ls /dev/tty[a-zA-Z]*') uart_dev= '/dev/ttyS3' #定义串口端口 baudrate = 115200 #波特率 val = 1500 #舵机初始位置(0位) incr = 100 #舵机转位递增(减)步长 try: ser = serial.Serial(uart_dev, int(baudrate), timeout=1) # 1s timeout except Exception as e: print("open serial failed!\n") print(ser) print("Starting demo now! Press CTRL+C to exit") while True: #舵机一秒转位一次,到达限位后反转,往复转动 if val >= 2500: #高限位 incr = -incr if val分享 微信 微博 QQ 图片 上一篇:【地平线旭日X3派试用体验】烧录镜像与UBUNTU桌面环境初体验 下一篇:开发者说 | AI操控机器人系列第三期——语音控制 |
【本文地址】
公司简介
联系我们